2 Flugsteuerungen und Avionik
Kapitel 2 – Flugsteuerungen und Avionik
Das Nervensystem moderner Agrardrohnen
Einleitung
Eine moderne Agrardrohne besteht aus weit mehr als einem Rahmen mit Motoren und Propellern. Erst das Zusammenspiel aus Sensorik, Recheneinheit, Kommunikationssystemen und Regelalgorithmen ermöglicht einen stabilen, autonomen und sicheren Flugbetrieb. Diese Gesamtheit wird als Avionik bezeichnet.
Der Begriff Avionik setzt sich aus den englischen Wörtern Aviation und Electronics zusammen und beschreibt alle elektronischen Systeme, die für den Betrieb eines Luftfahrzeugs erforderlich sind. Während in der bemannten Luftfahrt seit Jahrzehnten hochentwickelte Avioniksysteme eingesetzt werden, haben Fortschritte in der Mikroelektronik dazu geführt, dass vergleichbare Technologien heute auch in kompakten unbemannten Luftfahrzeugen verfügbar sind.
Im Bereich der Agrardrohnen übernimmt die Avionik mehrere zentrale Aufgaben:
- Stabilisierung der Fluglage
- Positionsbestimmung
- Navigation
- Missionsplanung
- Sensorfusion
- Kommunikation mit der Bodenstation
- Sicherheitsüberwachung
- Steuerung der Nutzlast
Erst das Zusammenspiel dieser Komponenten macht autonome Flugmissionen mit hoher Präzision möglich.
Aufbau eines modernen Flight Controllers
Ein Flight Controller ist ein spezialisierter Echtzeitrechner, der kontinuierlich Messwerte verschiedener Sensoren verarbeitet und daraus Steuerbefehle für Motoren und Aktoren ableitet. Moderne Systeme arbeiten mit Abtastraten von mehreren hundert bis mehreren tausend Messungen pro Sekunde.
Ein typischer Flight Controller besteht aus folgenden Komponenten:
- Mikroprozessor (MCU)
- Inertiale Messeinheit (IMU)
- Barometer
- Magnetometer
- GNSS-Schnittstelle
- Spannungs- und Stromüberwachung
- Telemetrieschnittstellen
- PWM-, DShot- oder CAN-Ausgänge
- Datenspeicher (Flash oder SD-Karte)
Alle Komponenten kommunizieren über interne Bussysteme wie I²C, SPI, UART oder CAN miteinander.
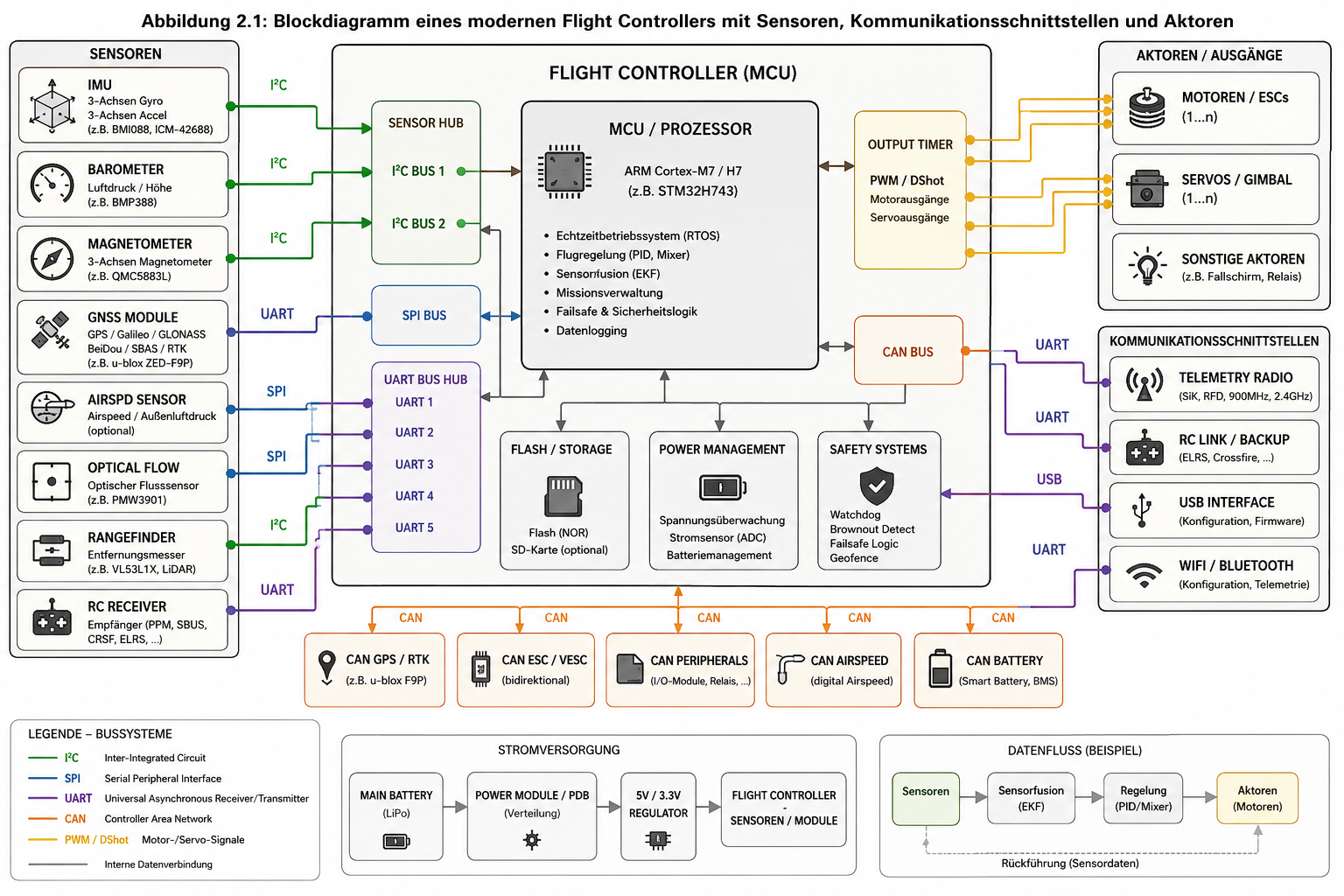
Abbildung 2.1: Blockdiagramm eines modernen Flight Controllers mit Sensoren, Kommunikationsschnittstellen und Aktoren.
Die Aufgaben eines Flight Controllers
Ein Flight Controller arbeitet in einem geschlossenen Regelkreis. Sensoren liefern kontinuierlich Messwerte über die Lage und Bewegung der Drohne. Diese Daten werden gefiltert und miteinander kombiniert. Anschließend berechnet die Regelungssoftware die erforderlichen Stellgrößen für die Motoren.
Der grundlegende Ablauf lässt sich wie folgt darstellen:
Sensoren
↓
Sensorfusion
↓
Regelung
↓
Motorsteuerung
↓
Flugbewegung
↓
Neue Sensordaten
Dieser Regelkreis (PID **Proportional, Integral und Differenzial) läuft während des gesamten Fluges permanent ab und sorgt dafür, dass die Drohne ihre Fluglage stabil hält oder einer vorgegebenen Flugbahn folgt.
2.1 Der Flight Controller – Aufbau und Aufgaben
- Mikrocontroller
- Speicher
- Echtzeitbetriebssystem
- Bussysteme (I²C, SPI, UART, CAN)
- Schnittstellen
2.2 Die IMU – Das Gleichgewichtsorgan der Drohne
- Was ist eine IMU?
- MEMS-Technologie
- Beschleunigungssensoren
- Gyroskope
- Sensorfusion
- Drift
- Kalibrierung
2.3 Gyroskope und Beschleunigungssensoren
- Drehraten
- Winkelgeschwindigkeiten
- Roll
- Nick
- Gier
- Vibrationen
- Filter
2.4 Magnetometer (Kompass)
- Erdmagnetfeld
- Heading
- Deklination
- Störungen
- Kalibrierung
- Kompassfehler
2.5 Barometer
- Luftdruck
- Höhenmessung
- Wettereinflüsse
- Terrain Following
- Höhenregelung
2.6 GNSS und RTK
- GPS
- Galileo
- GLONASS
- BeiDou
- Mehrfrequenzempfänger
- RTK
- PPP
- Genauigkeit
2.7 Sensorfusion
Hier wird es besonders interessant.
Wir erklären:
- Warum GPS allein nicht ausreicht.
- Warum Gyroskopnicht ausreicht.
- Warum Beschleunigungssensoren driften.
- Und wie ein Kalman-Filter alle Sensoren kombiniert.
2.8 Regelungstechnik
Hier kommen wir zum Herzstück.
- PID-Regler
- Feed Forward
- Notch Filter
- Dynamic Filter
- Adaptive Filter
- Motor Mixer
- Quaternionen
- Euler-Winkel
.
2.9 Kommunikation
- MAVLink
- MSP
- CRSF
- ELRS
- SBUS
- CAN
- DroneCAN
- UART
- Bluetooth
- WiFi
Hier erklären wir sämtliche Protokolle.
2.10 Sicherheit
- Failsafe
- Return-To-Home
- Geofence
- RTL
- Batteriemanagement
- Watchdog
- Redundanz
- Notlandung
Teil 3
Jetzt verlassen wir die Elektronik.
Dann kommt:
Teil III
Sensorik
- RGB
- Multispektral
- LiDAR
- Thermal
- OpenDroneMap
- NDVI
- Photogrammetrie
- QGIS
- GIS
- Punktwolken